Sepetiniz şu an boş.
Alışverişe Başla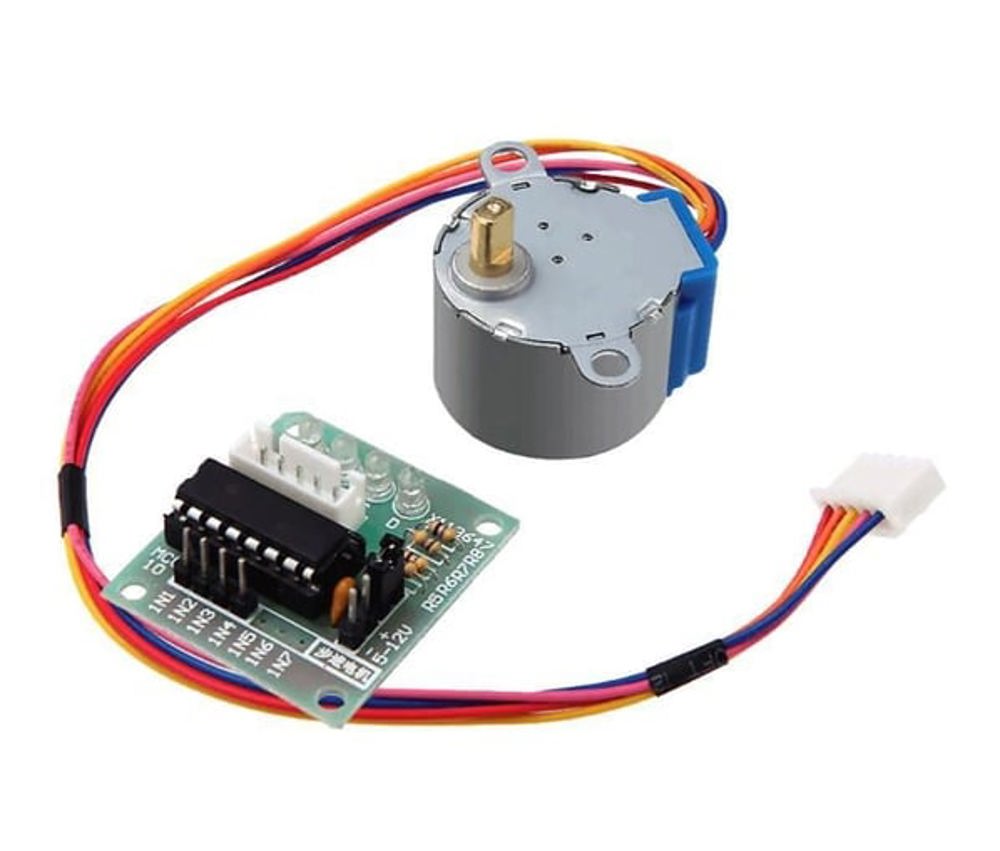
Step Motor ve ULN2003A Step Motor Sürücü Kartı Seti - 5V
Kdv Dahil Toplam Fiyat:
130,00
TLHızlı Teslimat
14:00'e kadar aynı gün kargoda.
Güvenli Ödeme
256-Bit SSL ile %100 güvenli.
Kolay İade
14 gün içinde iade garantisi.
Teknik Destek
Uzman ekibimizden destek alın.
Robotik Programlama Projeleriniz için özel destek.
28BYJ-48 Redüktörlü Step Motor ve ULN2003A Sürücü Kartı, robotik projelerde, otomasyon sistemlerinde ve hassas konumlandırma gerektiren mekanizmalarda (örneğin otomatik panjurlar, CNC makineleri veya akıllı ev kilit sistemleri) en sık kullanılan, fiyat/performans oranı en yüksek motor-sürücü ikilisidir.
İçerisindeki dahili dişli kutusu (redüktör) sayesinde küçük boyutuna rağmen yüksek bir tutma torku sunar ve adım adım hassas dönme hareketi sağlar.
1. 28BYJ-48 Step Motor Teknik Özellikleri
Bu motor, standart DC motorlar gibi serbestçe dönmek yerine, kendisine gönderilen sinyallere göre belirli açılarla (adımlarla) döner. Unipolar (tek kutuplu) yapıda olup 5 adet bağlantı kablosuna sahiptir.
Çalışma Gerilimi: Genellikle 5V DC (Projelere göre 12V versiyonları da mevcuttur).
Adım Açısı (Motorun Kendi Çekirdeği): $5.625^\circ$ / 64 (Yani motorun içindeki çekirdek bir turu 64 adımda tamamlar).
Redüksiyon (Dişli) Oranı: 1/64 (İçerisinde 64:1 oranında bir dişli kutusu vardır. Motor mili 64 tur döndüğünde, dışarıdaki çıkış mili sadece 1 tam tur döner).
Toplam Adım Sayısı (Çıkış Mili İçin): * 4 Adım Modunda (Full-Step): $64 \times 32 = 2048$ adım (Mil, bir tam turu 2048 adımda tamamlar).
8 Adım Modunda (Half-Step): $64 \times 64 = 4096$ adım (Hassasiyeti artırmak için mil, bir tam turu 4096 adımda tamamlar).
Kablo Sayısı: 5 Kablo (Mavi, Pembe, Sarı, Turuncu ve ortak besleme olan Kırmızı).
2. ULN2003A Step Motor Sürücü Kartı
Mikrodenetleyiciler (Arduino, Raspberry Pi vb.) step motorların dönmek için ihtiyaç duyduğu yüksek akımı (akım çekimini) doğrudan kendi pinlerinden sağlayamazlar. ULN2003A kartı, mikrodenetleyiciden aldığı düşük akımlı kontrol sinyallerini yükselterek motorun sargılarını güvenle besleyen bir akım sürücü (Darlington çifti) köprüsüdür.
Sürücü Entegresi: ULN2003A
Durum LED'leri: Kart üzerinde motorun A, B, C, D fazlarının (sargılarının) anlık olarak hangilerinin aktif olduğunu gösteren 4 adet sinyal LED'i bulunur. Bu LED'ler kodun doğru çalışıp çalışmadığını gözlemlemek için harika bir hata ayıklama (debugging) aracıdır.
Bağlantı Kolaylığı: Motorun 5 pinli soketi, sürücü kartı üzerindeki beyaz yuvaya ters takılma riski olmadan doğrudan oturur.
Besleme Jumper'ı: Kart üzerindeki jumper sayesinde motor beslemesi ($5\text{V} - 12\text{V}$) kolayca kesilebilir veya köprülenebilir.
3. Bağlantı Şeması ve Pin Eşleşmeleri
Sürücü kartını Arduino gibi bir geliştirme kartına bağlarken aşağıdaki pin yapısı kullanılır:
Sürücü Girişleri (IN1 - IN4) -> Mikrodenetleyici Pinleri
IN1: Dijital Pin (Örn: Arduino Pin 8) -> Motor Faz A
IN2: Dijital Pin (Örn: Arduino Pin 9) -> Motor Faz B
IN3: Dijital Pin (Örn: Arduino Pin 10) -> Motor Faz C
IN4: Dijital Pin (Örn: Arduino Pin 11) -> Motor Faz D
Güç Bağlantıları
GND (-): Mikrodenetleyicinin GND pini ve harici güç kaynağının eksisi (-) birleştirilmelidir.
VCC (+): Sürücü kartının $+$ pinine harici $5\text{V}$ güç kaynağı bağlanmalıdır. (Motorun çekeceği akımdan dolayı beslemeyi doğrudan Arduino'nun 5V pininden almak yerine harici bir kaynaktan almak kartın sağlığı için daha güvenlidir).
4. Çalışma Mantığı (Adım Dizilimleri)
Motorun dönmesi için içerideki bobinlerin belirli bir sıra ile enerjilendirilmesi gerekir. Kodlama yaparken kütüphane kullanılmayacaksa şu iki yöntemden biri seçilir:
4 Adım Modu (Tam Adım / Full-Step) - Yüksek Tork
Bobinler sırasıyla tek tek veya ikişerli tetiklenir. Dönüş daha hızlıdır ve tork yüksektir.
IN1 (YÜKSEK) - Diğerleri DÜŞÜK
IN2 (YÜKSEK) - Diğerleri DÜŞÜK
IN3 (YÜKSEK) - Diğerleri DÜŞÜK
IN4 (YÜKSEK) - Diğerleri DÜŞÜK
8 Adım Modu (Yarım Adım / Half-Step) - Yüksek Hassasiyet
Bobinler bir tek, bir çift olacak şekilde tetiklenir. Motor çok daha pürüzsüz ve sarsıntısız döner, adım hassasiyeti iki katına çıkar ($4096$ adım).
IN1
IN1 + IN2
IN2
IN2 + IN3
IN3
IN3 + IN4
IN4
IN4 + IN1
Not: Eğer daha gelişmiş projeler yapıyorsanız, hızlanma ve yavaşlama (ramp) profillerini otomatik yöneten Arduino içerisindeki yerleşik Stepper.h veya daha profesyonel olan AccelStepper kütüphanelerini kullanabilirsiniz.
Bu ürün için video içeriği bulunmuyor.
İade Politikası
İade edilecek ürünlerin orijinal ambalajında ve kullanılmamış olması gerekmektedir. 14 gün içerisinde kolay iade hakkınız mevcuttur.
Talep Oluştur
Formu hızlıca doldurun.
Yöntemini Seç
Adresten alım veya teslim.
Kodunu Not Et
Size özel kargo kodunu alın.
Ürünü Gönder
Eksiksiz şekilde kargoya verin.
Hızlı Geri Ödeme
Onay sonrası anında iade.
